Muud seadmed
Seadme nimetus: Kiirfreesimisspindel PDS ja ABB robot IRB6640
Seadme tüüp: Materjalide kiirprototüüpimise seadmed
Piirangud: toote mõõtmetele, töödeldavad materjalid, töötlemise täpsus, seadmele juurdepääs tingimustega
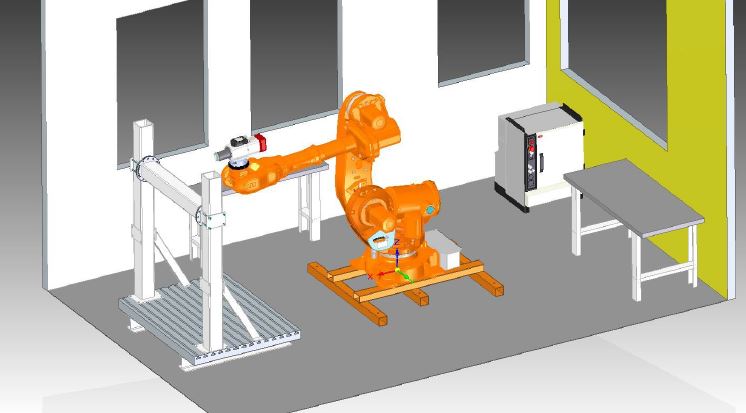
Seadme kirjeldus: Robotsüsteemi kasutamine freesimiseks annab võimaluse kasutada väga suurt tööala, mis on traditsiooniliste metallilõikepinkide puhul piiratud. Samuti ei pea töö- või abiorganid paiknema töötluskeskuses, vaid võivad olla eraldiseisvad üksused, mida juhitakse läbi kontrollersüsteemi. Robotmanipulaatori kuus telge võimaldavad töödelda väga keerulisi kujupindu ühes paigalduses. Kiirfreesimise robotsüsteemi eesmärgiks on freesida pehmeid materjale kõvadusega kuni 160 HB. Materjalideks on puit, erinevad plastid, alumiinium ja vasesulamid.
ABB robot IRB6640 ja kiirfreesimine
Seadme tootja: ABB
Mark ja mudel: ABB IRB6640/180-2,55 robot, IRC5 kontroller, spindel PDS XLHS 110
Tööpõhimõte: materjali eemaldamine kiirfreesimise teel
Seadme gabariidid: kuueteljeline robot (1000x1200x2500 mm), kontroller (600x800x1200 mm), rakistus toodete kinnitamiseks
Komplekti kuuluvad: robotmanipulaator, robotsüsteemi kontroller, spindel, töölaud ja rakistussüsteem
Tööala suurus: maksimaalne töötlemise ruumala 1500x2000x3000 mm
3D töötlemise täpsus: 0,1 mm
Töötlemise aeg: sõltub toote keerukusest ja mõõtmetest
Süsteemi näidispildid ja võimalus 3D mudelit vaadata
Seadme nimetus: Mehaaniline katsetusseade
Seadme tüüp: Materjalide omaduste määramine
Piirangud: toote mõõtmetele, seadmele juurdepääs tingimustega
Mehaaniline katsetusseade
Seadme tootja: Instron
Mark ja mudel: Instron 5969
Tööpõhimõte: materjali tõmbekatse, materjali survekatse
Seadme gabariidid: katsestend (1000x1200x2500 mm)
Komplekti kuuluvad: katseseade, arvuti koos tarkvaraga, haaratsid
Tööala suurus: katsekeha peab vastama standardile
Katse kiirus: reguleeritav 0,001 mm/min kuni 600 mm/min
Katsetustarkvara: võimaldab katsetada ning katsetulemusi töödelda vastavalt EN 10002-1, EN ISO 527-1, ISO 10275 ja ISO 10113 järgi